[아두이노] 7 Segment LED 제어
오늘은 LED 제어의 연장선상으로 7 Segment LED를 제어해 보도록 하겠습니다. 사용될 함수는 LED 제어때 사용한 pinMode( ), digitalWrite( )만 이해하시면 쉽게 제어를 할 수 있습니다.
1. 7 Segment LED

A,B,C,D,E,F,G,DP 핀으로 총 8개의 핀으로 구성되어 있습니다. 각 핀은 위 그림에서 보는것 같지 해당 위치의 LED에 불을 제어하는 핀으로 생각하시면 됩니다. 실제로 구매하시면 애노드형과 캐소드형이 있는데 위아래핀이 애노드 7 Segment LED이고 좌우고 캐소드였나 암튼 가상시뮬레이터에서 사용하는게 애노드형 초기 기본으로 되어 있는데 속성창에서 캐소드형으로 바꿔서 실험할 수 있습니다.
애소드와 캐소드 차이
7 Segment LED핀들이 가상시뮬레이터에서는 핀에서 COM1, COM2 핀이 있는데 아무핀이나 하나에 5V(+)핀이면 애노드형이고 Gnd(-)핀이면 캐소드형이 됩니다.
- 애노드 : A~G,DP핀이 0V이고 COM1 or COM2가 5V이면 해당 핀 LED에 불이 들어옵니다.
- 캐소드 : A~G,DP핀이 5V이고 COM1 or COM2가 Gnd이면 해당 핀 LED에 불이 들어옵니다.
쉽게 말해서 서로 반대라고 생각하시면 됩니다. 애노드형은 출력핀이 0일때 LED에 불이 들어오고 캐소드형은 출력핀이 1일때 LED에 불이 들어온다는 것만 이해하시면 됩니다. 참고로 7 Segment LED를 구매하실때 제품이 애노드형인지 캐소드형인지 확실히 확인하시고 구매하세요. 그래야 햇갈리는 핀연결과 코딩을 하지 않습니다.
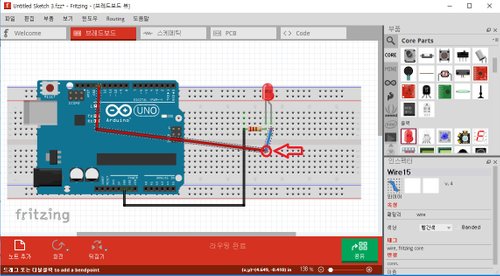
2. 회로도 구성
- 준비물 : 7 Segment LED 1개, 저항 330옴 1개, 아두이노우노
- 내용 : 알파벳과 숫자를 출력해보자.
| 애노드형모델 | 캐소드형모델 |
|---|

| 
|
대충 붉은선이 5V에 연결되어 있고 검은선이 Gnd에 연결된 모습을 보면 대충 알겠죠.
##3. 코딩
- 사용함수 : pinMode( ), digitalWrite( )
- 내용 : 애노드형모델 기반으로 알파벳과 숫자를 순차적으로 출력하는 코딩을 해보자.
- 7 Segment LED의 각 led 제어 :
pinMode(핀, 모드)으로 전류를 출력할 핀들을 출력모드(OUTPUT) 사용하겠다고 선언
digitalWrite(핀, 상태)은 HIGH(5V) or LOW(0V)로 전류를 출력할지 말지를 결정(여기서, 1은 5V, 0은 0V)
7 Segment LED도 내부에 LED들을 제어하기 때문에 LED 제어할때랑 동일합니다. 애노드형이기 때문에 0일때 불이 들어고 1일때 불이 꺼진다는 것만 생각하시고 코딩에 들어가세요. LED 제어의 복습차원이라고 생각하시면 됩니다. 참고로 알파벳과 숫자를 만드는 수작업인 노가다가 필요합니다.
설계
(1) 알파벳(A,B,C,D,E,F)과 숫자(0,1,2,3,4,5,6,7,8,9) 만들기

A글자 만들려면 LED D핀이 꺼지고 나머지 핀들이 켜져야 겠죠.(켜기=0, 꺼지기=1)
00010000
배열로 A[8]={0,0,0,1,0,0,0,0} 이 된다. 이건 하나의 A글자의 패턴입니다. 그러면 각 글자와 숫자의 패턴을 배열변수로 만들어야겠죠. 참고로, 앞에 7개는 글자나 숫자를 만드는 핀이고 마지막 8번째는 DP핀으로 점 LED 입니다. 0을 설정한 이유는 그냥 점 LED를 켜지는 것을 테스트 목적인것이지 의미는 없다는 점 참고하세요. 점 LED 빼고 싶다면 00010001 이러면 되겠죠.
아래 2차배열로 표현할때 점 LED은 글자가 출력할때 그냥 같이 켜지게 했고 숫자가 출력할때에 그냥 꺼지게 했어요. 원래 여러개 연결한다면 소숫점으로 사용하면 좋겠는데 한개 7 Segment LED라서 그냥 테스트로 켜지는지 보기위한 실험으로 의미는 없습니다.
int segValue[16][8] = {
{0,0,0,1,0,0,0,0}, //A
{1,1,0,0,0,0,0,0}, //B
{1,1,1,0,0,1,0,0}, //C
{1,0,0,0,0,1,0,0}, //D
{0,1,1,0,0,0,0,0}, //E
{0,1,1,1,0,0,0,0}, //F
{0,0,0,0,0,0,1,1}, //0
{1,0,0,1,1,1,1,1}, //1
{0,0,1,0,0,1,0,1}, //2
{0,0,0,0,1,1,0,1}, //3
{1,0,0,1,1,0,0,1}, //4
{0,1,0,0,1,0,0,1}, //5
{0,1,0,0,0,0,0,1}, //6
{0,0,0,1,1,1,1,1}, //7
{0,0,0,0,0,0,0,1}, //8
{0,0,0,0,1,0,0,1} //9
};
(2) 알파벳과 숫자를 만들었다면 실제 출력해야겠죠.
int segPin[8]={2,3,4,5,6,7,8,9};
for(int i=0;i<9;i++){
pinMode(segPin[i], OUTPUT);
}
- 출력 : 이부분이 실제 코딩 로직의 전부입니다. 각 패턴를 for문으로 루프 도는게 전부임
for(int i=0;i<16;i++){ //16패턴
for(int j=0;j<8;j++){ //패턴값
digitalWrite(segPin[j], segValue[i][j]);
}
delay(1000);
}
애노드형모델 코딩을 실제 하면은
int segValue[16][8] = {
{0,0,0,1,0,0,0,0}, //A
{1,1,0,0,0,0,0,0}, //B
{1,1,1,0,0,1,0,0}, //C
{1,0,0,0,0,1,0,0}, //D
{0,1,1,0,0,0,0,0}, //E
{0,1,1,1,0,0,0,0}, //F
{0,0,0,0,0,0,1,1}, //0
{1,0,0,1,1,1,1,1}, //1
{0,0,1,0,0,1,0,1}, //2
{0,0,0,0,1,1,0,1}, //3
{1,0,0,1,1,0,0,1}, //4
{0,1,0,0,1,0,0,1}, //5
{0,1,0,0,0,0,0,1}, //6
{0,0,0,1,1,1,1,1}, //7
{0,0,0,0,0,0,0,1}, //8
{0,0,0,0,1,0,0,1} //9
};
int segPin[8]={2,3,4,5,6,7,8,9}; //사용핀{a,b,c,d,e,f,g,dp} 순서대로임
void setup() {
for(int i=0;i<9;i++){
pinMode(segPin[i], OUTPUT);
}
}
void loop() {
for(int i=0;i<16;i++){
for(int j=0;j<8;j++){
digitalWrite(segPin[j], segValue[i][j]);
}
delay(1000);
}
}
for문에 대해서 저번에 설명을 했으며 for문을 이해해야만 왜 이렇게 코딩이 되었는지 이해가 되실꺼에요.
혹시 이해가 안되시는 분들은 LED 제어(아두이노)를 다시 한번 보시고 간단히 소개된 for문을 보시고 대충 어떤 느낌인지 살펴보세요.
여기서 캐소드형 경우는
패턴배열변수값들을 반대로 하시면 됩니다.
int segValue[16][8] = {
{1,1,1,0,1,1,1,1}, //A
{0,0,1,1,1,1,1,1}, //B
{0,0,0,1,1,0,1,1}, //C
{0,1,1,1,1,0,1,1}, //D
{1,0,0,1,1,1,1,1}, //E
{1,0,0,0,1,1,1,1}, //F
{1,1,1,1,1,1,0,0}, //0
{0,1,1,0,0,0,0,0}, //1
{1,1,0,1,1,0,1,0}, //2
{1,1,1,1,0,0,1,0}, //3
{0,1,1,0,0,1,1,0}, //4
{1,0,1,1,0,1,1,0}, //5
{1,0,1,1,1,1,1,0}, //6
{1,1,1,0,0,0,0,0}, //7
{1,1,1,1,1,1,1,0}, //8
{1,1,1,1,0,1,1,0} //9
};
코딩에서는 for문을 사용해서 led 출력핀들의 모드와 출력상태를 표현하는 것과 2차배열로 7 Segment LED패턴을 표현하는 것 두개뿐이 없습니다. 패턴을 2차배열로 표현하는 노가다 작업만 있을 뿐이죠.
4. 결과

애노드형 모델을 실험 동영상입니다.